近日,beat365英国官网网站闫曉軍教授團隊發明了一種用于昆蟲尺寸機器人的微型動力系統,并以此為基礎,研制了一種快速機動、高載重、無線可控的微型機器昆蟲“BHMbot,BeiHang Microrobot”(身長2 cm,重1.76 g,含能源、控制、通訊和傳感模塊)。2024年5月8日,相關研究成果以“A Wireless Controlled Robotic Insect with Ultrafast Untethered Running Speeds”為題在線發表于《Nature Communications》雜志,這是北航發動機領域的首篇子刊級論文。北航beat365英国官网网站劉志偉助理教授、詹文成博士生為第一作者,北航beat365英国官网网站闫曉軍教授、清華大學集成電路學院伍曉明副教授為通訊作者,beat365英国官网网站為第一完成單位。
仿生機器昆蟲具有尺寸小、運動靈活、可達性好等突出優勢,在災後救援、大型機械裝備檢修、信息獲取等領域具有廣泛應用前景。在微小體積限制下完成能量的高效轉化和運動軌迹的精确輸出,研制微型動力系統及機器昆蟲面臨的挑戰有“如何提高微型動力系統的能量轉換效率”“如何提高機器昆蟲的載重能力”“如何精确控制機器昆蟲的運動軌迹”等3個方面。
為提高微型動力系統的能量轉換效率,團隊發明了一種基于直線式驅動和柔性鉸鍊傳動的新型動力系統,可以在厘米尺寸下實現能量的高效轉化。微型動力系統中,直線式驅動器将輸入的電能轉化為機械能,并向外輸出機械振動;柔性鉸鍊傳動機構将這種振動轉換為仿生腿的周期振動(圖1de)和機器昆蟲機體的高頻彈跳運動(圖1h),最終實現電能到動能的高效轉換(圖1)。

圖1 微型動力系統工作原理和BHMbot機器昆蟲運動機理
針對現有機器昆蟲載重後性能衰退的問題,團隊設計并實現了一種仿生奔跑步态(視頻1)。奔跑過程中,BHMbot機器昆蟲可以通過自身步頻和步幅的自适應調節,實現高載重下的快速爬行。現有昆蟲尺寸機器昆蟲在集成電源和控制模塊等載重後會出現速度驟降的現象(下降幅度可達90%),BHMbot機器昆蟲能夠通過跳躍頻率的增加抵消單次跳躍步幅衰減帶來的影響,當承載5.5倍自身質量的重物後,BHMbot仍能維持25倍身長每秒的速度(視頻2)。當載重低于一定臨界值時,BHMbot機器昆蟲運動速度甚至可以實現随載重增加而上升的趨勢(圖2a)。
視頻1-仿生奔跑步态
視頻2-帶載快速爬行

圖2 BHMbot機器昆蟲高承載機理
針對機器昆蟲的軌迹控制,團隊提出了一種基于雙腿頻率差的控制方法,僅用兩路驅動器即可實現BHMbot機器昆蟲的驅動和方向控制。基于提出的控制方法,團隊研制了厘米級的微型控制和通訊電路(圖3de),在集成能源、控制和通訊模塊後,BHMbot機器昆蟲可實現程序控制和遙控控制。通過預設程序,BHMbot機器昆蟲可以實現圓形、矩形(見視頻3)和字母“BUAA”運動軌迹(見視頻4);同時,通過電腦或手機端發送實時控制指令,BHMbot機器昆蟲可采用無線遙控的方式實現運動避障(見視頻5)。
視頻3-圓形和矩形軌迹
視頻4-字母軌迹
視頻5-遙控避障

圖3 BHMbot機器昆蟲控制策略
BHMbot機器昆蟲可以适應多種應用場景,例如災後救援、航空發動機檢測等。目前已完成求救信号采集驗證,可以模拟災後搜救的場景。在模拟場景中,BHMbot機器昆蟲穿過石頭等障礙物後到達倒塌房屋附近,然後采集房屋内部發出的SOS求救信号并将其回傳至控制端(圖4a,圖4b,見視頻6)。除用于災後搜救外,研究人員希望未來BHMbot機器昆蟲也可用于航空發動機結構損傷檢測。BHMbot機器昆蟲體積小、機動性高,可以攜帶圖像采集模塊進入發動機内部開展結構損傷檢測,可以克服現有目視檢測和孔探檢測技術可達性不足的缺陷。目前,BHMbot機器昆蟲已經實現在航空發動機内部曲面結構上的脫線可控爬行,如渦扇發動機外涵道(圖4c,視頻7)、渦噴發動機尾噴管(圖4d,視頻7)。未來,BHMbot機器昆蟲将集成微型攝像頭以實現發動機内部結構的圖像采集和回傳,并基于采集到的圖像開展結構損傷智能識别。
視頻6-聲音采集
視頻7-發動機内部爬行
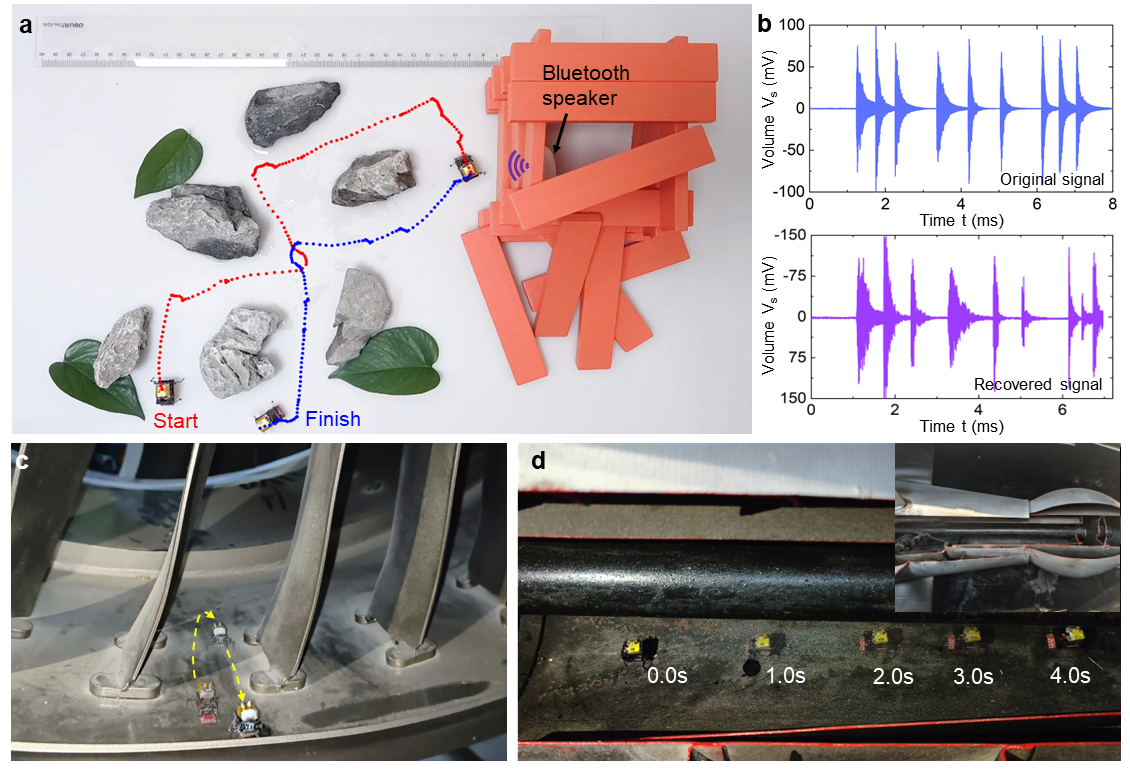
圖4 BHMbot機器昆蟲應用場景演示
附:北航作者簡介
共同第一作者

劉志偉 beat365英国官网网站助理教授,碩導
北航beat365英国官网网站助理教授,碩士生導師,入選2024年北京市青年人才托舉計劃。主要從事昆蟲尺寸微型仿生機器人、氫能航空電推進等相關研究,在Nature Communications, IEEE Transactions on Robotics, Applied Energy, International Journal of Mechanical Sciences 等國際期刊發表SCI論文40餘篇,受邀在IEEE MEMS 國際會議做大會報告2次,授權國家發明專利15項,承擔博士後科學基金面上項目、國家自然科學基金青年項目、北京市自然基金面上項目、科技委創新項目、北航青年拔尖人才支持計劃等縱向課題。

詹文成 beat365英国官网网站博士生
博士生導師為闫曉軍教授、劉志偉助理教授。研究方向為微型機器人動力與控制,在Nature Communications, Measurement, 和IEEE Robotics and Automation Letter等國際期刊發表SCI論文7篇,授權國家發明專利一項。
共同通訊作者

闫曉軍 beat365英国官网网站教授,博導
教授,博士生導師,入選國家級領軍人才計劃,北航beat365英国官网网站院長,教育部先進航空發動機協同創新中心副主任,美國加州大學Berkeley分校訪問學者。長期從事飛行器動力裝置相關基礎研究,在Science Robotics、Nature Communications、International Journal of Plasticity等期刊發表SCI論文80餘篇,EI論文60餘篇,授權國家發明專利35項。研究成果應用于航天飛行器和航空發動機。獲全國百篇優秀博士論文、教育部新世紀優秀人才、教育部科技進步二等獎、湖南省國防科技進步一等獎、“航空強國中國心”教育基金突出貢獻獎特等獎等。
論文原文鍊接:https://doi.org/10.1038/s41467-024-47812-5








